The Mach–Zehnder in the cryo lab was installed with a beamsplitter mounted on a 3 port mount. Went to install the second readout of the Mach–Zehnder and discovered this. I have since reinstalled the beamsplitter with an appropriate mount, put the other 1811 PD with a lens in front of it on the second readout path, and recovered the alignment on both paths. Minor alignment is still needed to maximize visibility but there are fringes.
Additionally, the source of the oscillations on the PD in reflection of the cavity are still unresolved. Here are some things I know about it:
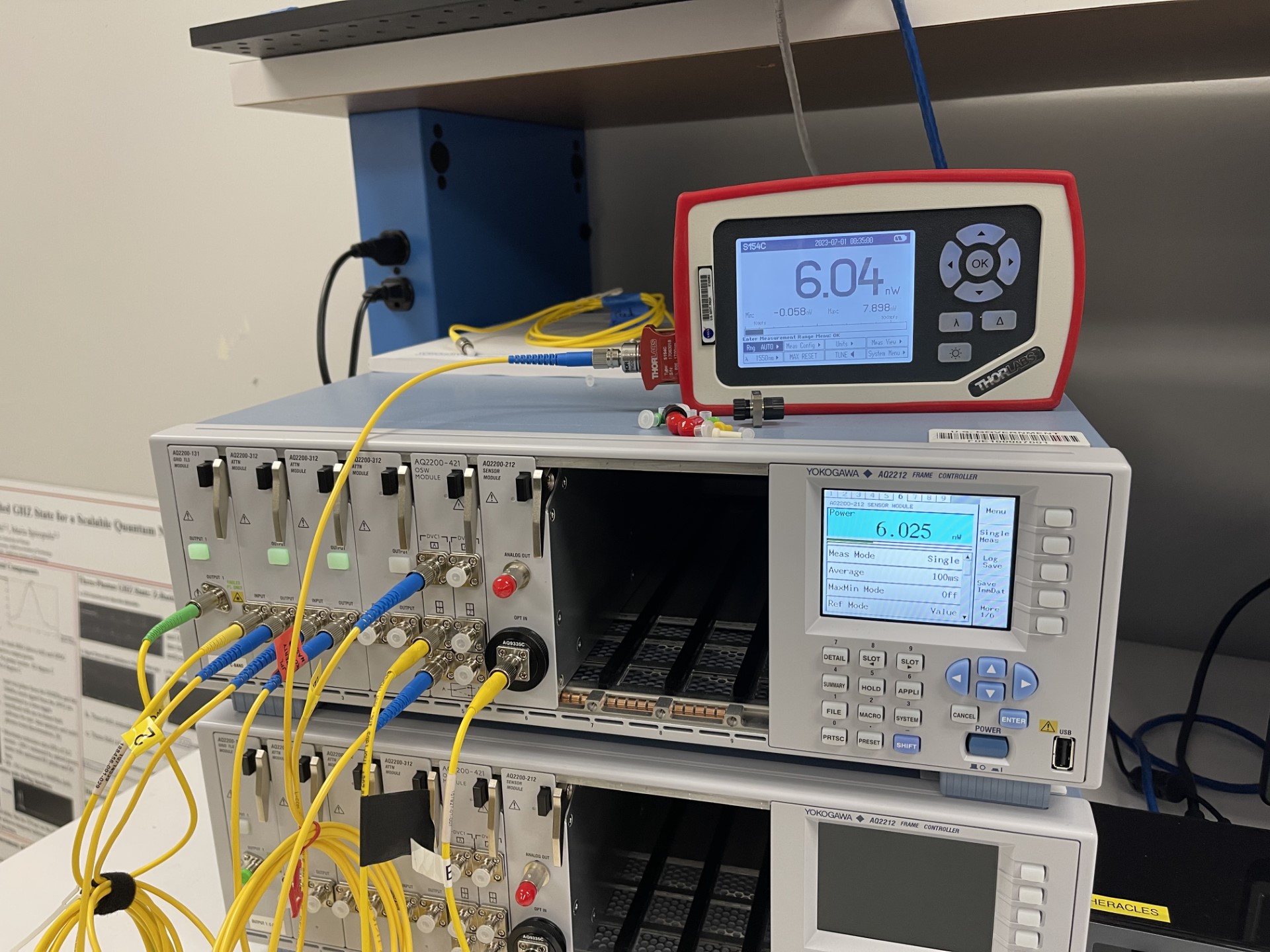
1) I don't believe they are physical power fluctuations with the laser. As you can see from the screen shot, those fluctuations are between ~3-4 volts on the PD. If these were physical power fluctuations they would show up on a power meter; they don't.
2) They don't seem to be a saturation issue as you can use the half wave plate + PBS to control the amount of power to the cavity and they still occur at very low power.
3) Thought maybe an electrical issue. I substituted the power source for a new 15V power source that we just bought from Newport. Aaron suggested having the moku and PD power from the same power strip so they have a common ground. Also I've tried plugging in the PD to different outlets all around the room. Nothing has worked.
4) The new 1811 I installed in the Mach-Zehnder path (that doesn't see the cavity at all) does not have these fluctuations.
My only other idea is maybe the suspension of this chamber that the cavity is housed in (if it has a suspension) is causing it but I'm unsure how to mitigate/test for that. If anyone has any ideas, please let me know.